

同一个工件,多次测量结果存在差异;或者不同人员测量时,结果不完全一致。这是因为设备精度不够,还是操作人员经验不足?答案全不尽然,原因也往往出在极易被忽视的坐标系建立环节。建系一旦出现偏差,后续使用三坐标实测的所有数据,都将基于错误的参考系,测量数据便会彻底失去意义。
本篇文章我们将以具备国际权威PTB认证的PMT INSPECT三维测量软件为例,结合派姆特关节臂三坐标的典型应用场景,详细介绍软件功能分区、常用建系方式及适用条件,匹配用户多样化的检测需求,为先进制造业提供数字化质量管控方案。
软件界面功能区介绍
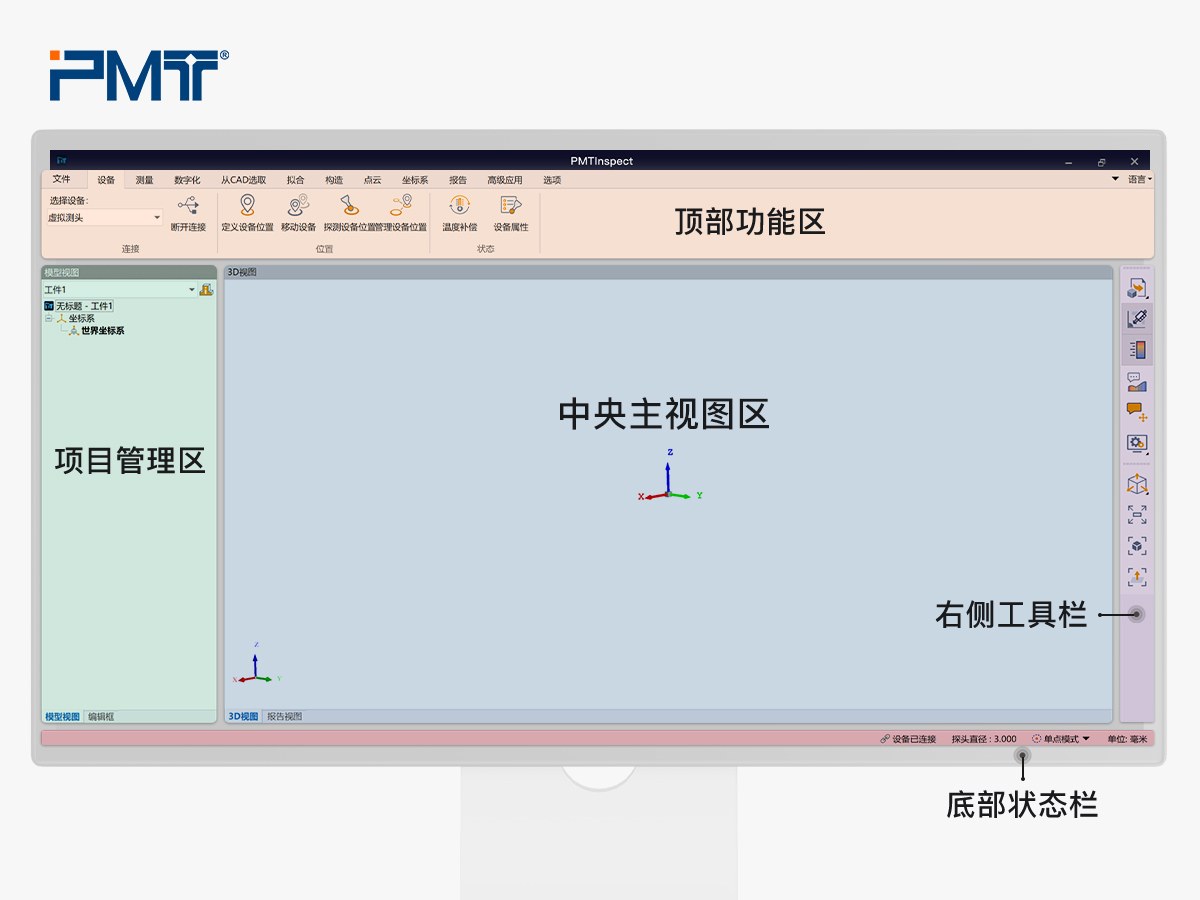
- 顶部功能区
顶部主菜单栏集成了软件所有核心功能入口,涵盖数模导入/导出、设备连接、特征创建、坐标系建立等测量前准备操作。值得一提的是,PMT INSPECT 支持灵活定制设备清单,用户测量前可按需勾选设备,后续连接时仅显示已选项,从而简化连接流程。
- 项目管理区
项目管理区是对测量对象的管理。模型视图以树状结构清晰地列出了项目中包含的所有数据,包括:导入的CAD数模/点云数据、对齐方式、特征对象管理、检测报告以及偏差彩图,便于用户对检测流程进行组织和追溯。
- 中央主视图区
中央主视图区展示所有模型、测量数据及检测结果。支持一键切换三维视图与测量报告,实现图形与分析同步掌控,尺寸和几何公差分析、数据对比等结果一目了然。
- 右侧工具栏
右侧集成测量时的常用操作,集中了CAD数模和点云数据的导入、几何公差和色谱图的显隐、注释标签及视图显示方式,便于用户在测量与分析过程中快速调用。
- 底部状态栏
底部状态栏提供清晰的状态确认,实时反馈设备连接、探头直径、测量模式、单位等关键信息,让您随时掌握系统运行状态。
详解“坐标系”

想要获得精确、稳定的测量方案,我们首先需要了解,如何利用三维测量软件中的“坐标系”界面正确建系。PMT INSPECT分为“新建”、“数模对齐”、“点云对齐”三大模块,满足不同工件结构、数据类型和检测目标下的建系需求。
- “新建”模块:本模块内置笛卡尔与圆柱坐标系,均用于标定工件的空间位置和姿态。笛卡尔坐标系以 X/Y/Z 三轴表征点位,应用最为广泛;圆柱坐标系适配法兰、齿轮等回转类零部件,是旋转工件定位的优选方案。
- “数模对齐”模块:该模块主要负责接触式测量的建系,包含“点线面对齐”、“三平面对齐”、“最佳拟合对齐”3种最常见的建系方式。其余的几种对齐方式主要用于特定场景下的测量,适合对专业度要求极高的测量任务,例如:“曲面点对齐”,非常适合不规则的工件,在钣金件检测场景中应用突出。
- “点云对齐”模块:主要适用于扫描场景,并且必须在有数模的情况下使用。它通过将实际扫描获取的点云数据,与理论数模进行匹配,从而快速比对出工件的整体偏差,尤其适合检测曲面复杂、特征不规则的工件。
三坐标测量中常用的建系方式
按照建系原理与适用场景的不同,又各自进行了细分。接下来,将从建系原理、操作步骤、具体应用等方面,讲解“点线面对齐”、“三平面对齐”、“最佳拟合对齐”这3种最常见的建系方式,即使是初学者,看完也能轻松上手。
1. 点线面对齐
原理:通过一个点、一条线和一个面分别确定原点、轴向和基准平面。
“点线面对齐”是一种操作快速、直观且使用频率较高的建系方式,基于最经典的3-2-1原则,操作顺序通常为“先面、后线、再点”,一般适用于规则工件的测量。
使用派姆特(PMT)关节臂三坐标,在无数模的情况下进行操作演示:
Step1.1. 连接并激活设备
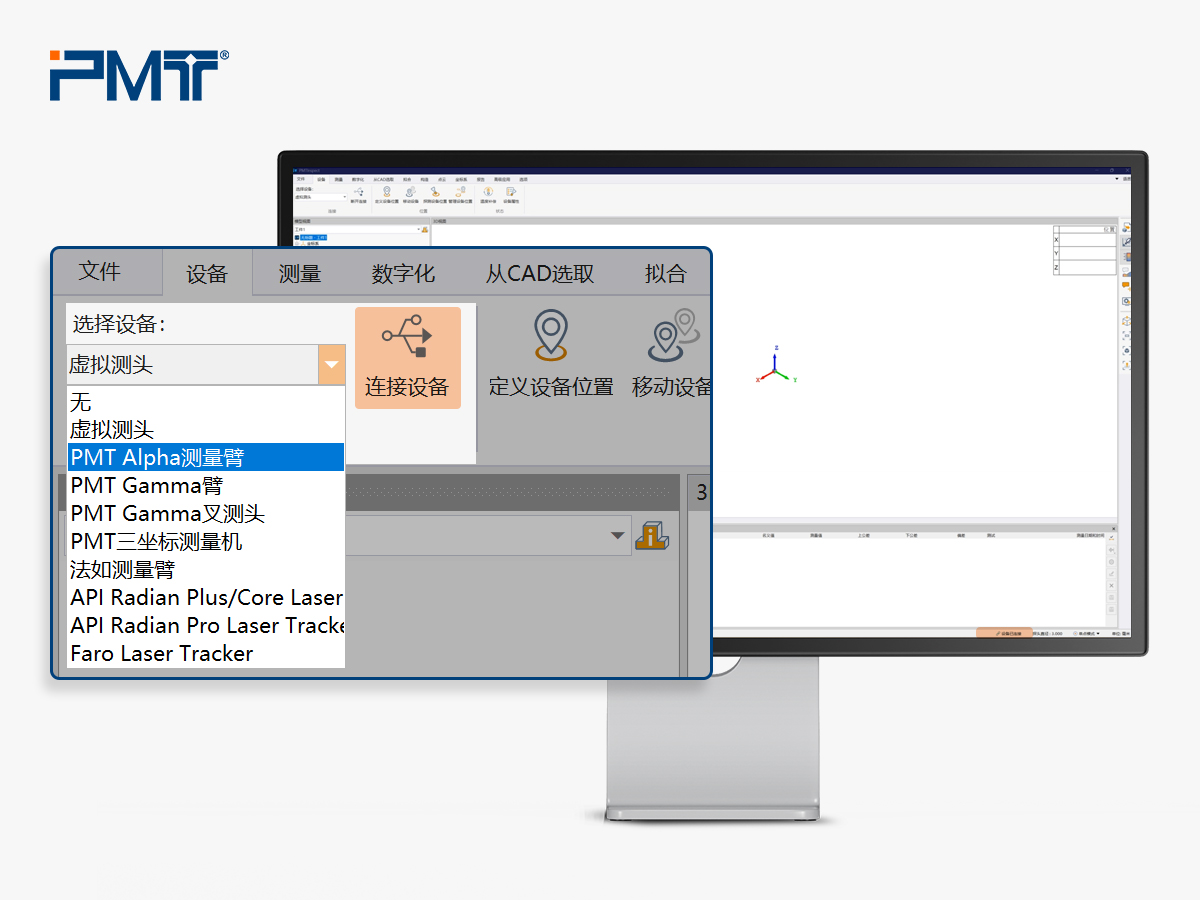
打开软件后,点击顶部功能区域的“设备”模块,在“选择设备”下拉框中选定机型,点击“连接设备”,连接成功后依照软件界面依次转动各关节激活设备便可正常运行。
Step1.2. 探测特征
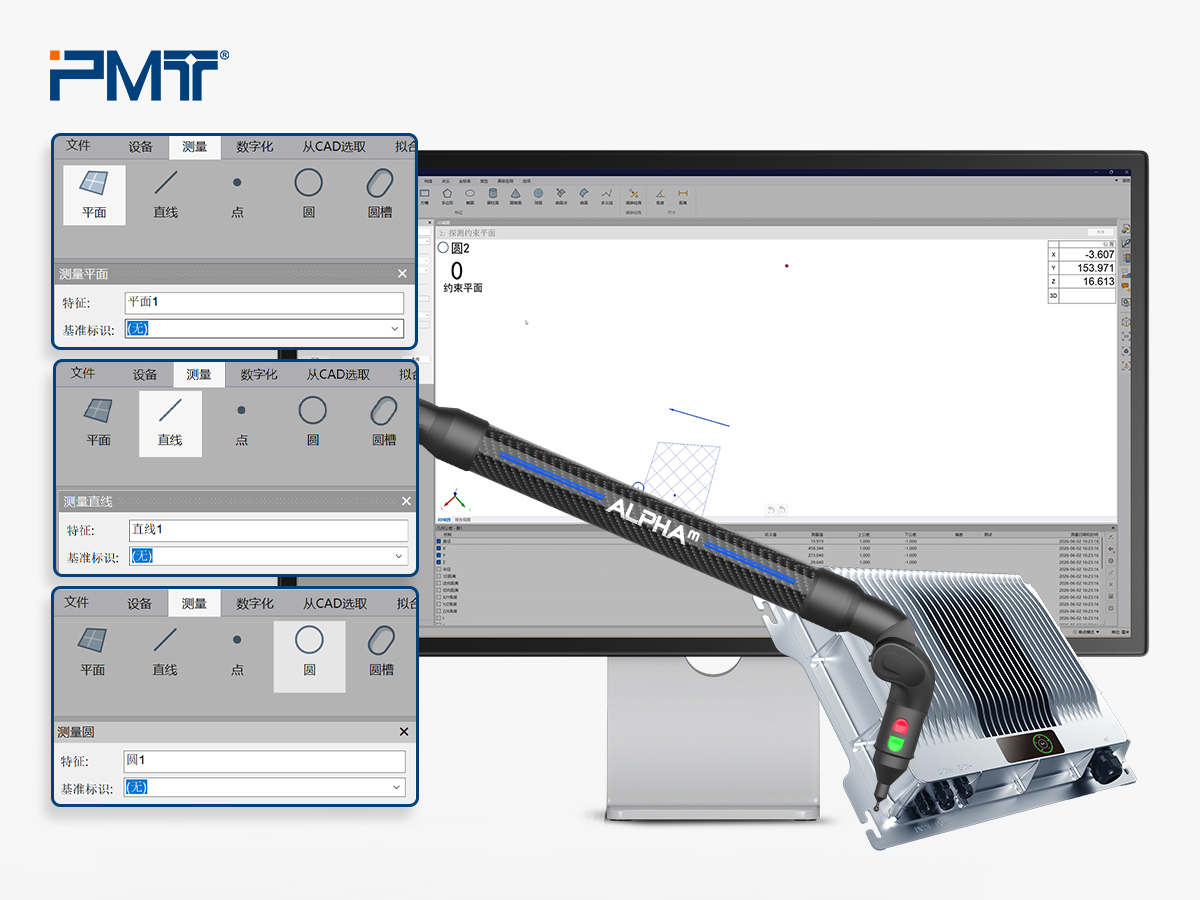
探测平面:点击“测量”模块下的“平面”命令,使用派姆特关节臂测量机在工件的上表面,均匀探测3或4个点,点的位置尽量保持分散,避免在同一条直线上;
探测直线:点击“测量”模块下的“直线”命令,在工件的前表面探测2个或以上的点(注意:这里需要先约束上一步探测的平面);
探测圆/点:点击“测量”模块下的“圆”命令,在工件的右侧面,靠近边角的位置进行采集;
Step1.3. 数字化名义值
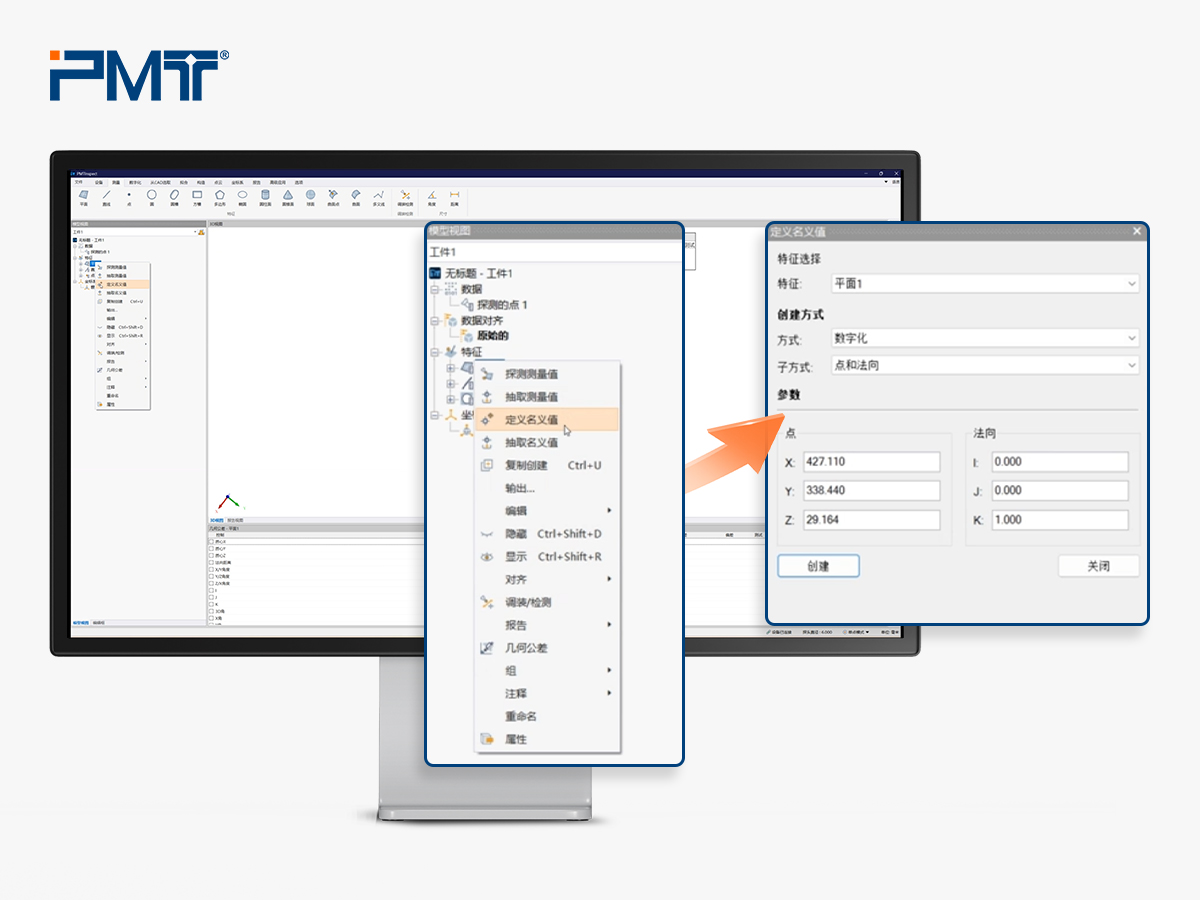
此时,在项目管理区中,选中已探测完成的“平面1”特征,鼠标右击“定义名义值”,在弹出的“创建方式”下拉框中,选择“数字化”,在“参数”的编辑框中,输入图纸要求的公差,点击“创建”。对“直线1”和“圆1”特征,执行同样的操作步骤;
Step1.4. 对齐建系
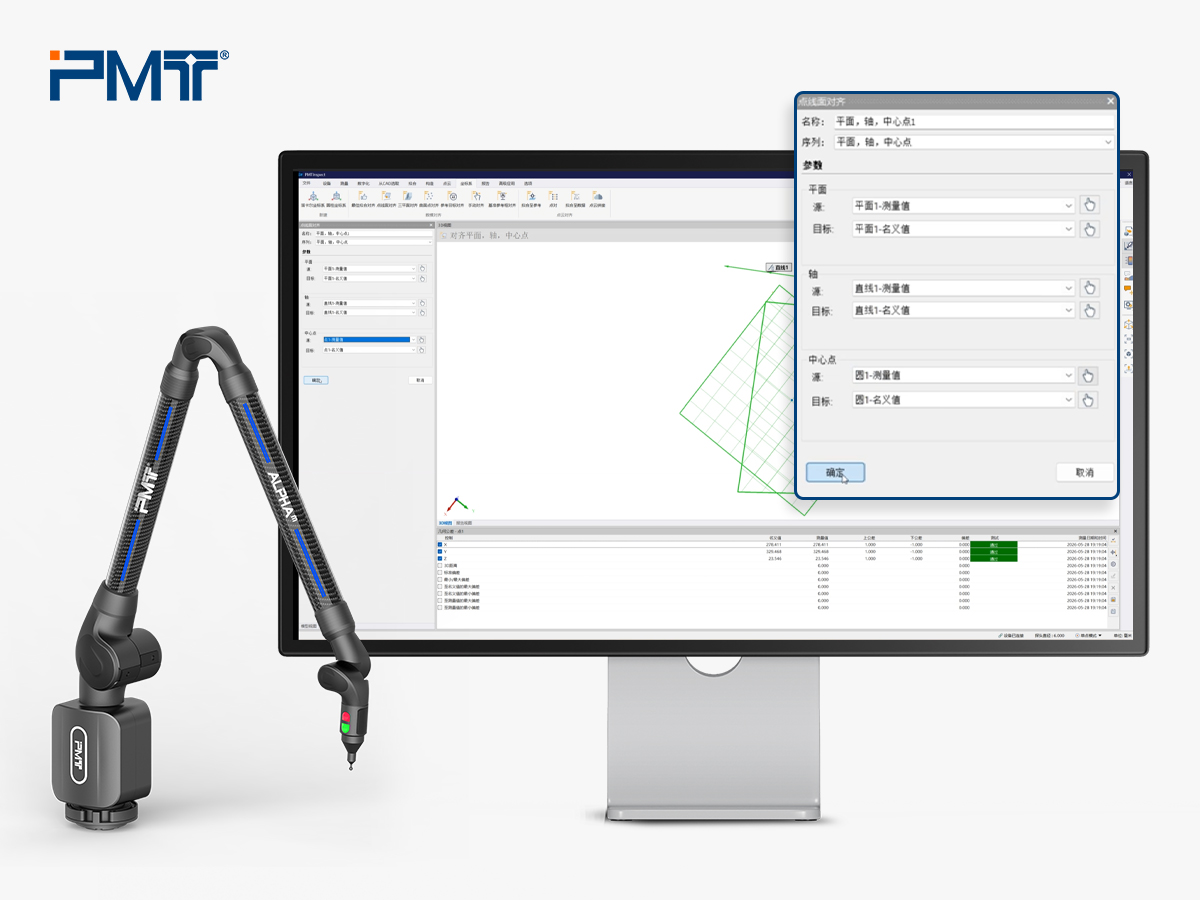
点击“坐标系”模块的“点线面对齐”,在“参数-源”选择特征的测量值,“目标”选择特征的名义值,平面/轴/中心点全部选择完成,点击确定,便完成了坐标系的建立。
2. 三平面对齐
原理:坐标系原点位于三个平面的交点,三个坐标轴分别垂直于对应基准平面。
“三平面对齐”同样是3-2-1原则的一种常见形式,用三个相互垂直的平面(或实际工件上的三个基准面)替代“面-线-点”,最终坐标系原点落在三个平面的交点上。它特别适合箱体类、棱柱状工件,基准明确为三个相互垂直的平面时,操作更自然,无需刻意找线和点。
使用派姆特(PMT)三坐标(关节臂三坐标),导入CAD数模,进行操作演示:
Step2.1. 连接并导入数模
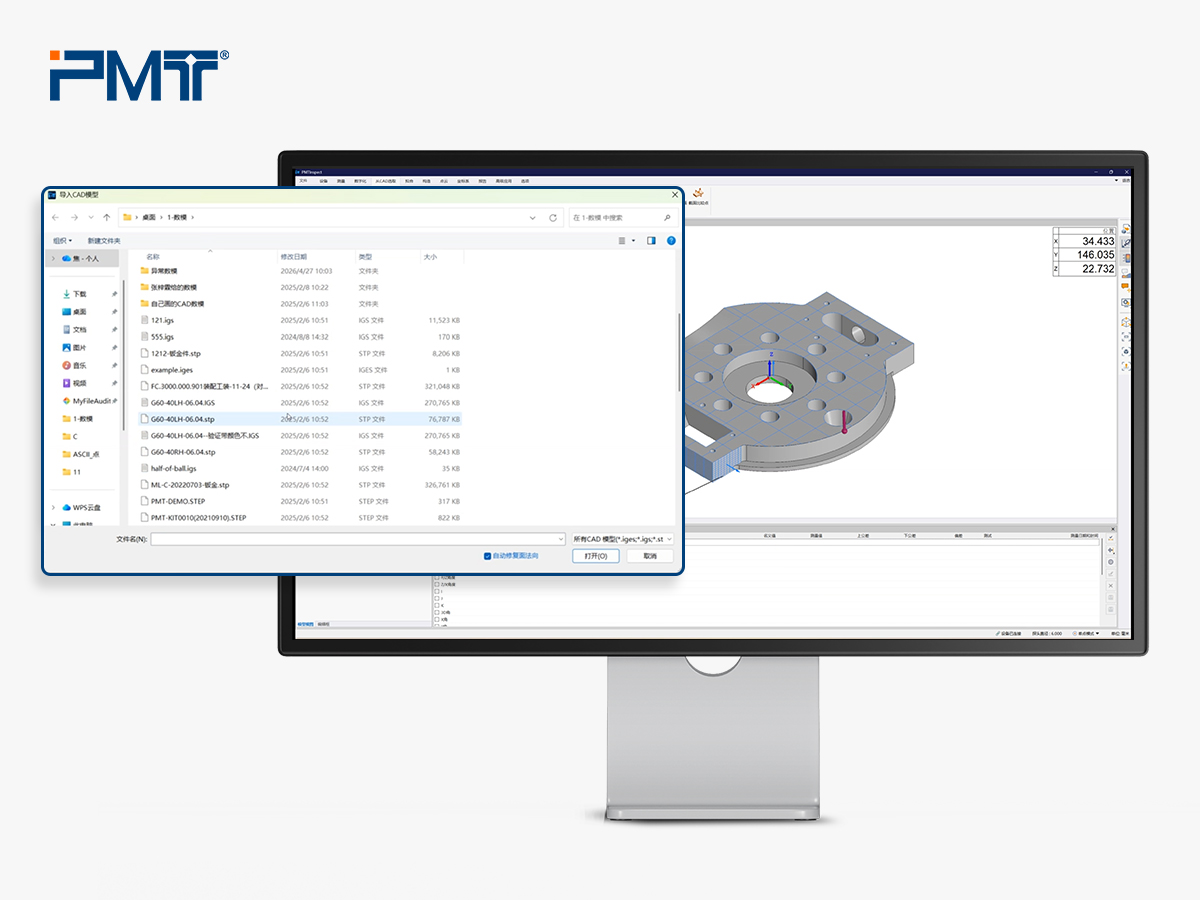
连接并激活设备操作同Step 1.1。随后点击“文件”-“导入”-“CAD数模”,在弹出的文件框底部勾选“自动修复面法向”,使用.step/.step/.iges/.igs格式数模导入;
Step2.2. 点选并探测特征
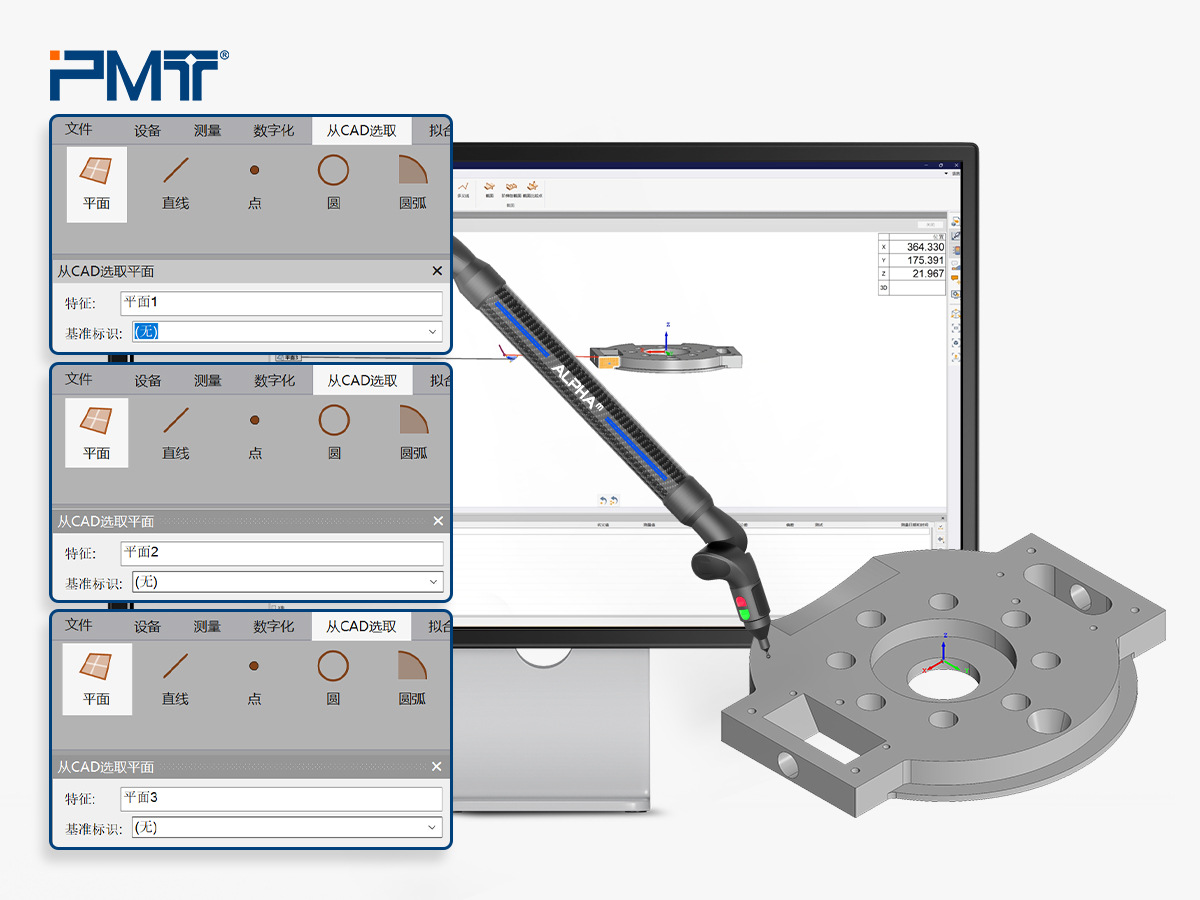
点击“从CAD选取”-“平面”,在数模上分别点选3个相互垂直的平面“平面1、平面2、平面3”。
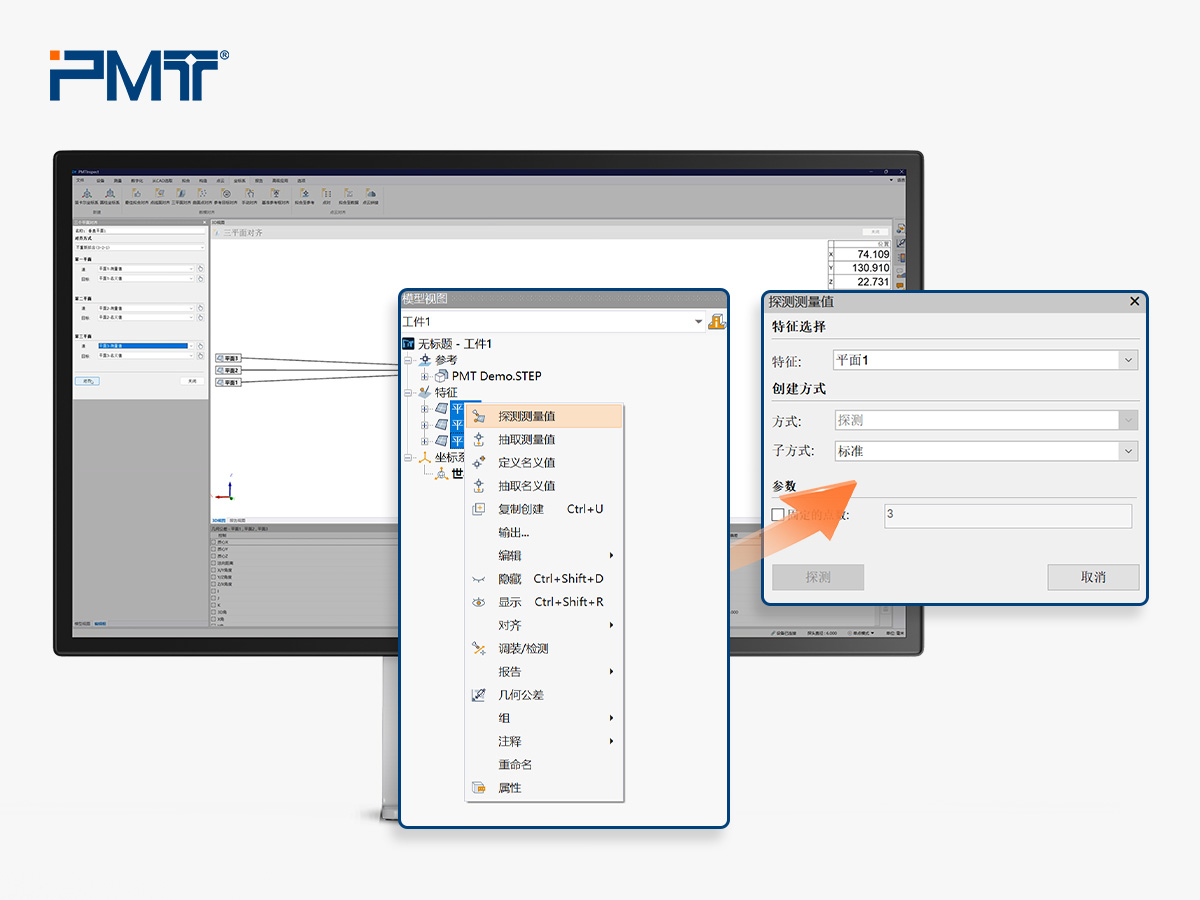
然后在“模型视图”区域选中,右击鼠标,选择“探测测量值”,分别探测这3个平面,每个平面探测的原则参考Step 1.2;
Step2.3. 对齐建系

点击“坐标系”-“三平面对齐”,选择“第一平面、 第二平面、第三平面”的参数:在“源”选择测量值,在“目标”选择名义值,并点击“对齐”,便完成了坐标系的建立。
在现场应用中,相比没有数模,导入CAD数模操作更加简单,准确性也更高,还可以实现更多的高级功能。例如:GD&T自动评定、批量检测及报告自动生成等,具有更高的一致性、自动化能力与数据复用性,更适合批量化检测场景。
3. 最佳拟合对齐
原理:通过最小化所有测量点与理论模型之间的整体偏差,实现全局最优匹配。
当工件缺少规则的基准特征(平面、直线、垂直平面),或者你关心的是工件的整体轮廓偏差,而非某个特定基准的定位时,上述两种方式可能无法满足建系需求,此时,推荐使用“最佳拟合对齐”建系。
“最佳拟合”必须在有数模的情况下才能进行,使用派姆特(PMT)关节臂三坐标进行操作演示:
Step3.1. 连接并导入数模
连接设备,导入数模,操作同Step2.1;
Step3.2. 点选并探测特征
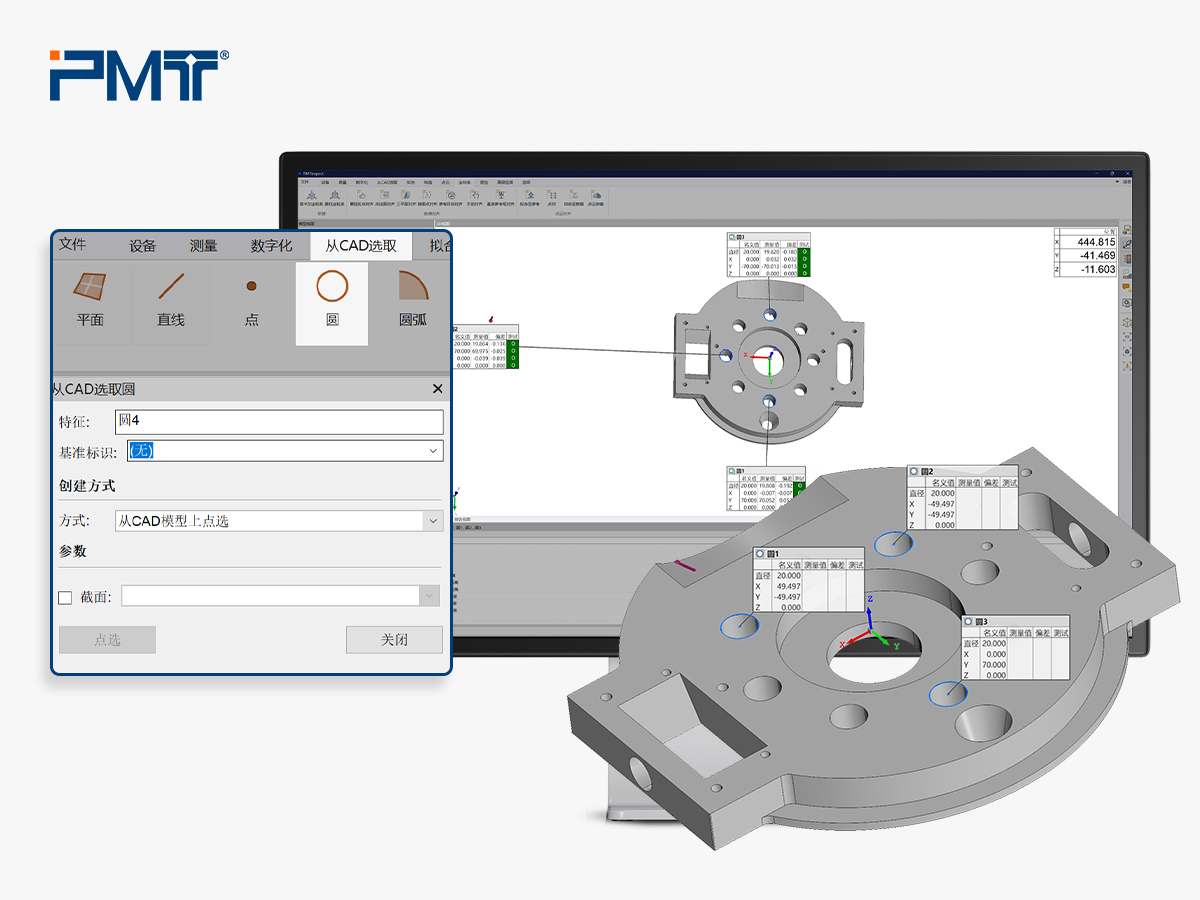
点击“从CAD选取-圆”,在CAD模型上点选“圆1、圆2、圆3”;在“模型视图”区域,选中“圆1、圆2、圆3”;

然后右击鼠标选择“探测测量值”,依次探测每个特征在工件上对应的实际位置,注意:测量圆之前,需要先约束平面;
Step3.3. 对齐建系

探测完毕后,在“模型视图”区域再次选中“圆1、圆2、圆3”,点击“坐标系”-最佳拟合对齐-开始”,便完成了坐标系的建立。
三种建系方式对比:
| 对比维度 | 点线面 | 三平面 | 最佳拟合 |
| 是否需要数模 | 均可 | 均可 | 必须要 |
| 稳定性 | 受采点方式和特征之间的空间关系
影响较大 |
高 | 高 |
| 典型应用场景 | 比较简单、规则的机加工件的
现场测量与维修 |
箱体、角件等
标准工业零件的测量 |
复杂装配件的测量与实时调装 |
| 优势 | 灵活、快速 | 稳定、标准化、一致性强 | 整体匹配最优 |
以上建系方式并无优劣之分,派姆特(PMT)建议:根据工件的基准特征以及测量目的,选择最适合的建系方式。
三坐标建系方式问题解答
上文对常用的3种建系方式进行了基础的说明,但在实际应用中,往往会遇到各种问题。以下整理了三坐标测量时建系相关的常见问题与解答,为您快速答疑解惑。
Q1: 测量检具时,使用“点线面对齐”建系,第一次测的结果很好,重新建系后再次测量偏差很大,是什么原因?
第一,工件本身可能存在形状误差,建系时采点过少也可能导致坐标系稳定性不足。
第二,检查建系方式是否改变,一旦改变所依据的基准不同,建系逻辑随之变化,坐标系的位置与姿态就会发生偏移,最终测量结果自然各不相同。
因此严格来说,并非测量结果变了,而是坐标系变了。这也印证了经验丰富工程师常强调的原则:检测逻辑必须服从装配逻辑。
Q2: 接触式测量中,经验丰富的工程师如何判断建系方式?
- 读懂图纸是前提:分析工件结构、图纸标准的基准以及实际检测目的;
- 稳定优先:结合现场实际情况,优先选择面积大、稳定性高的特征作为主基准;
- 模拟装配逻辑:想象工件在实际装配种的定位方式,使测量坐标系与装配基准保持一致。
Q3: 同一个零件,用三平面法建系测出来合格,用最佳拟合建系测出来超差,该信哪个?
看装配逻辑。如果零件实际是靠三个平面定位,信前者;如果靠多个特征共同配合,信最佳拟合。坐标系不同,结论自然不同。
派姆特多场景测量方案总结
从“点线面”,到“三平面”,再到“最佳拟合”,建系方式不断演进的目的,其实就是让检测结果更接近工件真实状态。尤其对于复杂工件、高精度检测以及装配分析场景,仅完成建系已经不够,如何真实还原装配逻辑,正在成为新的测量要求。当然,无论采用哪种建系方式,都需要规范地输出三坐标测量报告,满足行业的审核要求,作出整体合格与否的判定。
派姆特(PMT)自研三维测量软件PMT INSPECT通过丰富的建系方案,配合派姆特全域三维测量设备,帮助用户在现场快速建立更符合实际工况的坐标系。