12 3 月, 2026 派姆特关节臂测量机在工程机械龙头企业的现场检测方案 派姆特APLHA关节臂测量机搭配PMT INSPECT三维测量软件,凭借全流程、高精度、现场化的综合检测能力,已广泛应用于柳工、中联重科、杭叉、天润、潍柴等龙头企业,以快速现场检测提升质检与生产效率,缩短交付周期。 查看更多 >
10 3 月, 2026 展会预告:派姆特即将亮相2026 ITES工业展,邀您「精确」相遇 精准如约,PMT派姆特与您相约2026 ITES深圳工业展!GAMMA关节臂测量机焕新登场,PRIME三坐标测量仪双系列齐发,PMT INSPECT自研三维测量软件重点亮相——更多精彩,邀您亲临8-M15展位一探究竟! 查看更多 >
25 2 月, 2026 关节臂三坐测量机聚焦中国制造质量提升,赋能品牌出海 派姆特ALPHA关节臂三坐标测量机搭配PMT INSPECT 3D测量软件,将精密计量移至生产现场,高效助力国产装备产业升级,加速中国制造出海进程。 查看更多 >
06 2 月, 2026 三坐标CMM:如何与CNC协同构造质量闭环体系 在精密制造领域,伴随着工业产能的持续升级,质量控制已迈向“实时驱动”。PMT派姆特三坐标测量仪(CMM)凭借微米级检测精度结合PMT INSPECT三维测量软件与数控机床(CNC)共同实现加工与检测的高效闭环,为工艺优化与质量稳定提供可靠数据基础。 查看更多 >
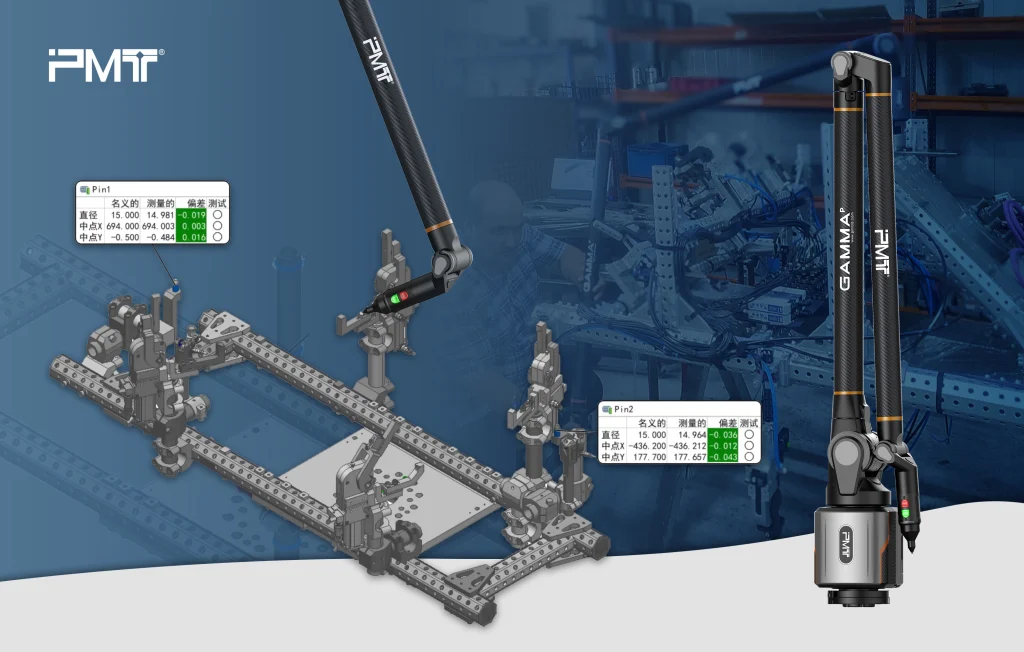
06 1 月, 2026 便携挑战,一臂之力:派姆特关节臂三坐标解锁行业测量价值 聚焦“便携”二字,派姆特(PMT)关节臂三坐标测量机可成功完成各行各业零部件的尺寸检测,所有偏差数据实时反馈至生产端,帮助企业快速调整加工工艺,有效提升零部件良品率。 查看更多 >
04 1 月, 2026 便携式三坐标:关节臂测量机赋能医疗设备精密制造 作为便携式三坐标测量设备,派姆特(PMT) 关节臂测量机凭借高精度、高便携性尤其是在线检测的能力,成为了医疗设备行业的重要检测手段。 查看更多 >
28 12 月, 2025 凝聚精度标准共识:派姆特应邀参与几何技术规范标准化技术委员会 在苏州召开的2025年全国几何技术规范标准化技术年会上,来自计量院、科研院所及高校的权威专家围绕精密测量技术展开交流,并集中评审15项国家标准送审稿。派姆特科技(PMT)自主研发的高端关节臂三坐标测量机成为焦点。 查看更多 >
17 12 月, 2025 轧管机螺旋伞齿轮检测案例:派姆特三坐标测量机应用实践 针对轧管机用螺旋伞齿轮的精度检测问题,PMT派姆特FUTURE PLUS三坐标测量机提供了高效、精准的测量解决方案,为齿轮质量控制与工艺优化提供可靠数据支持。 查看更多 >
20 11 月, 2025 关节臂三坐标测量机基于“蛙跳”技术的大尺寸测量应用指南 本文深度展示了派姆特(PMT)关节臂三坐标测量机结合蛙跳技术的协同过程,重点阐述了基于动态改变关节臂的“站位”并利用固定的参考点所形成的蛙跳测量方案。通过将多个站位的测量数据实时融合到一个统一的坐标系中,从而实现了“小臂测大物”的目标,最终实现有限测量直径下大尺寸工件形位公差的精度检测。 查看更多 >
08 11 月, 2025 客户案例丨派姆特三坐标测量仪如何助力旋启机械制造品质提升 本篇案例详述了PMT派姆特如何凭借着FUTURE PLUS 1587 三坐标测量仪的高精度、高性价比、强劲售后及技术自主等核心优势为成鑫机械定制了高效检测方案,破解部件装配痛点,拓展多工件检测,助力企业提质增效,支撑智能制造转型。 查看更多 >
09 9 月, 2025 关节臂测量机精准助力自动化工业机器人抓手的高精度检测 八角管抓手具有模块化,强度高,装配方便,使用寿命长等特性,在焊接与搬运自动化产线上的使用非常广泛。本篇案例将以土耳其一家领先的自动化解决方案商为引,为您展示如何使用关节臂三坐标为八角管抓手的全流程测量环节提供保障,提高抓手出厂使用的准确率与精度,大大缩短交付周期,降低成本。 查看更多 >