在手术机器人领域,三坐标轨迹检测被广泛应用于评估机器人的位姿精度和重复性。例如,在基于影像导航引导定位的手术机器人应用中,研究人员通过三坐标测量仪对机器人的工作空间进行测量,并评估了机器人在不同位姿下的距离准确度和重复性。实验结果表明,该方法可以有效地提高手术机器人的定位精度和手术成功率。
由于医疗设备机器人通常用于执行高精度、高风险的手术操作,因此其轨迹的准确性和稳定性直接关系到手术的成功率和患者的安全。因此,高精度的远程医用器械必须依据一流的国际质量控制标准。 为了打造高质量、性能优的医疗机器人,在研发阶段,通过使用「PMT」派姆特三坐标测量仪和关节臂三坐标测量机系列产品,结合软件测量出运动坐标,与自动化控制系统进行对比,并把结果反馈仿真,分析系统改进优化等各方面细节。

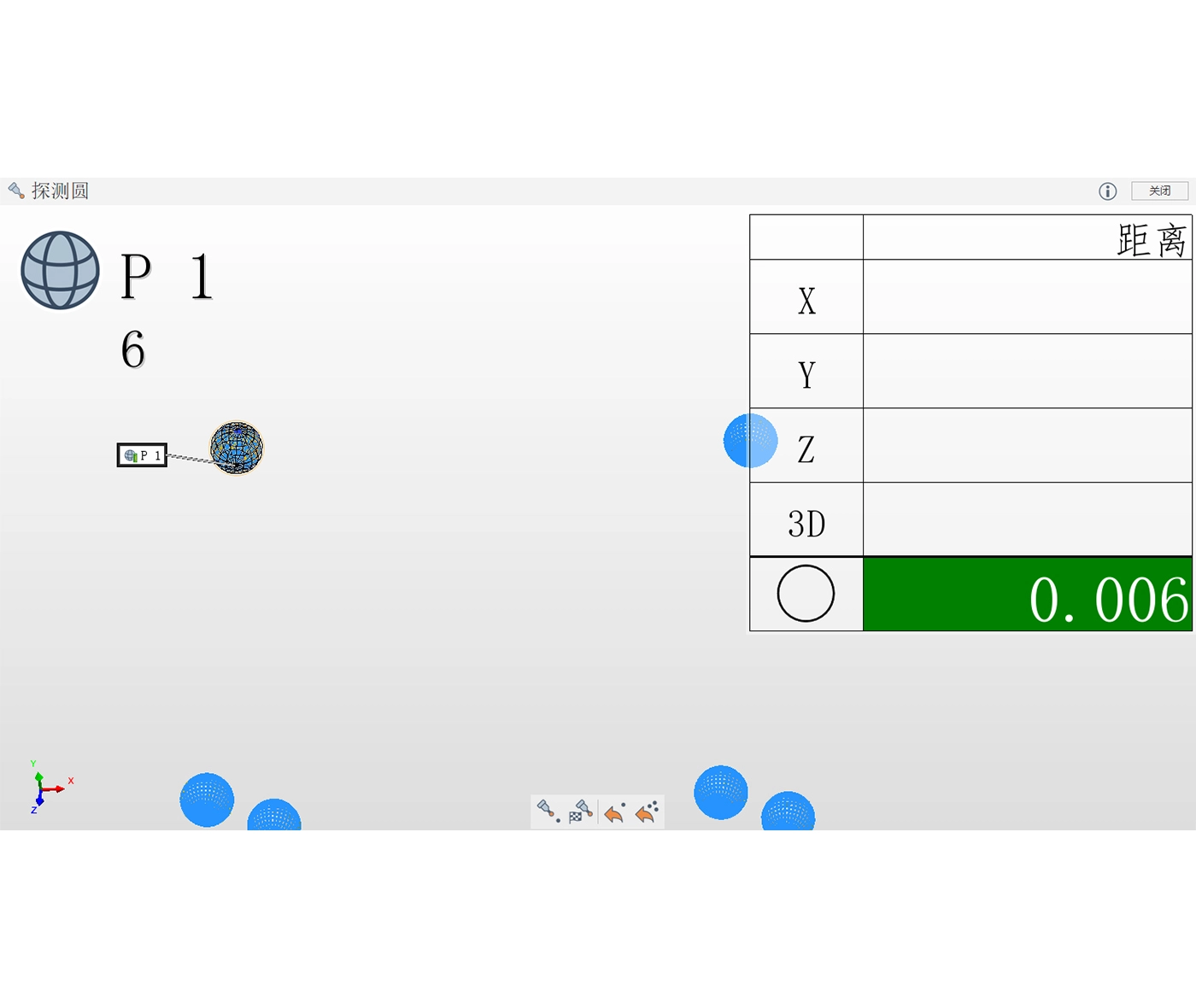
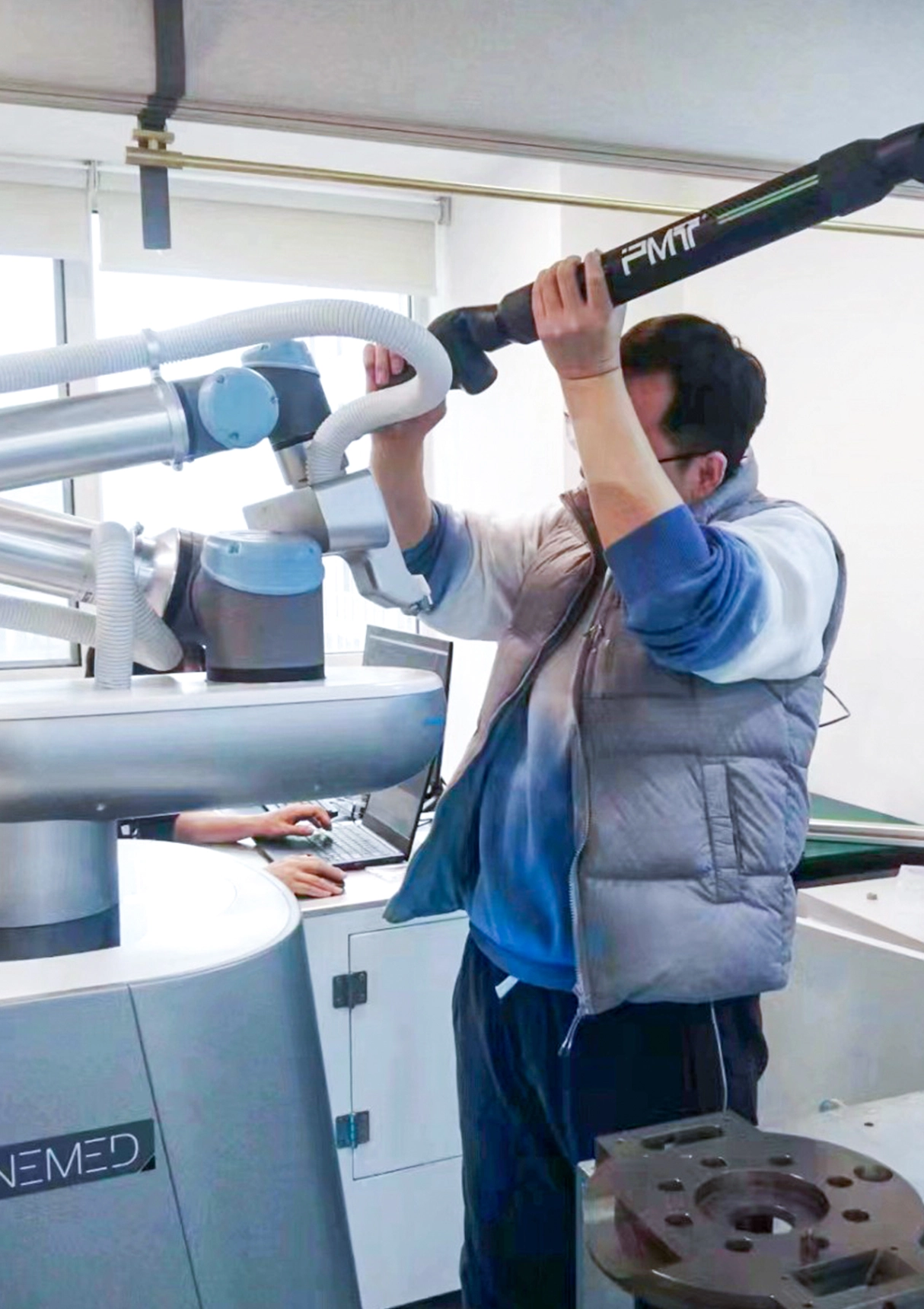
使用便携式(PMT)的三坐标测量机对医疗设备机器人的末端执行器进行接触式测量。这种方法可以直接获取机器人末端执行器在空间中的精确位置信息,测量出机器人末端行走的轨迹尺寸。(需要考虑到测量头与机器人末端执行器之间的接触力对测量结果的影响)
在使用PMT设备接触式测量过程中,当点数达到软件计算点数时,便会出现形状误差,这时可判断在测量过程中,机器人末端是否抖动,从而减少测量误差,增加准确性。
机械人末端行走不同姿态测量出不同位置坐标值,三坐标测出坐标值,和机器人数据做对比。可以很快的验证机器人轨迹的准确性,为下一步调整参数做出优化方案。
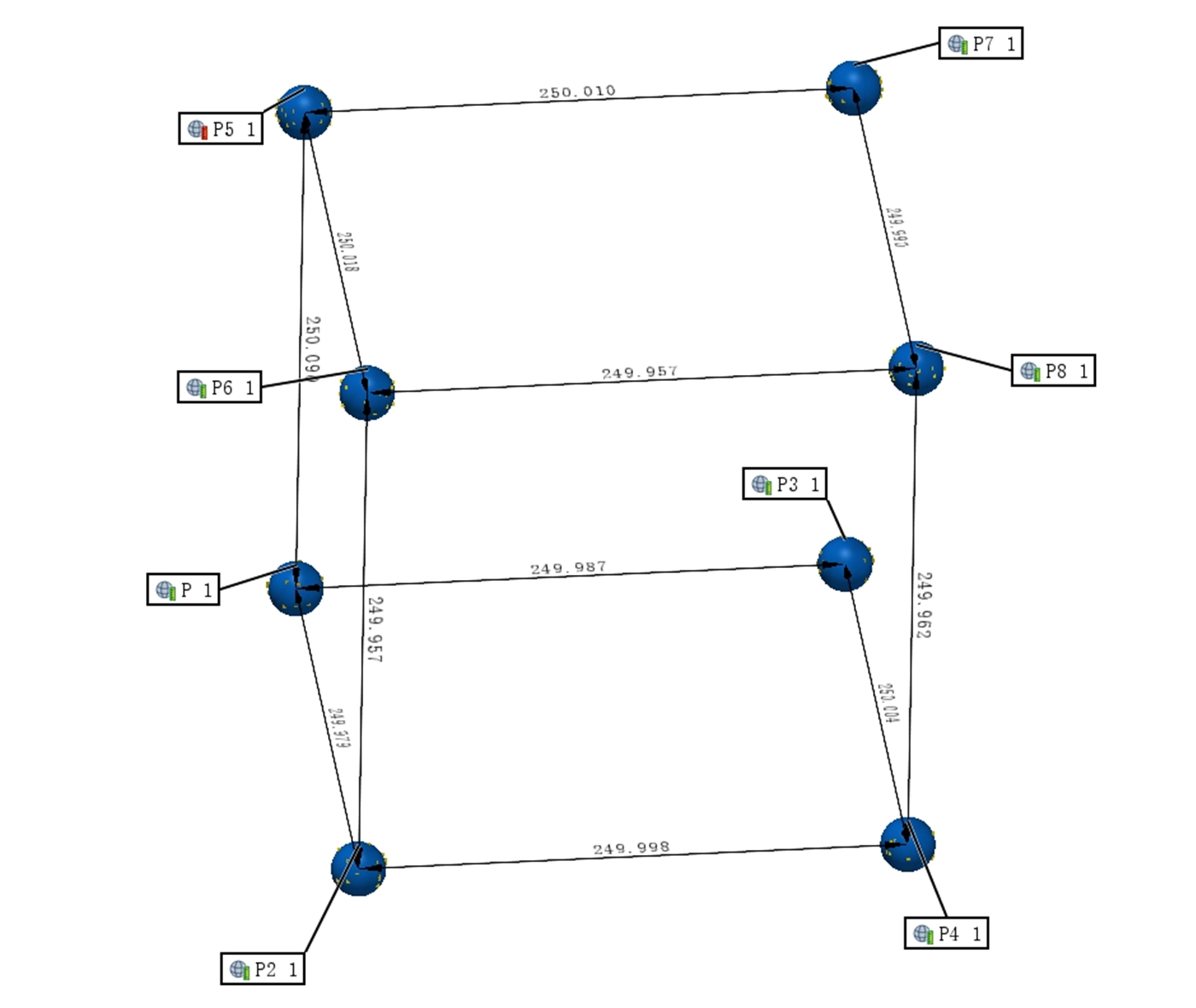
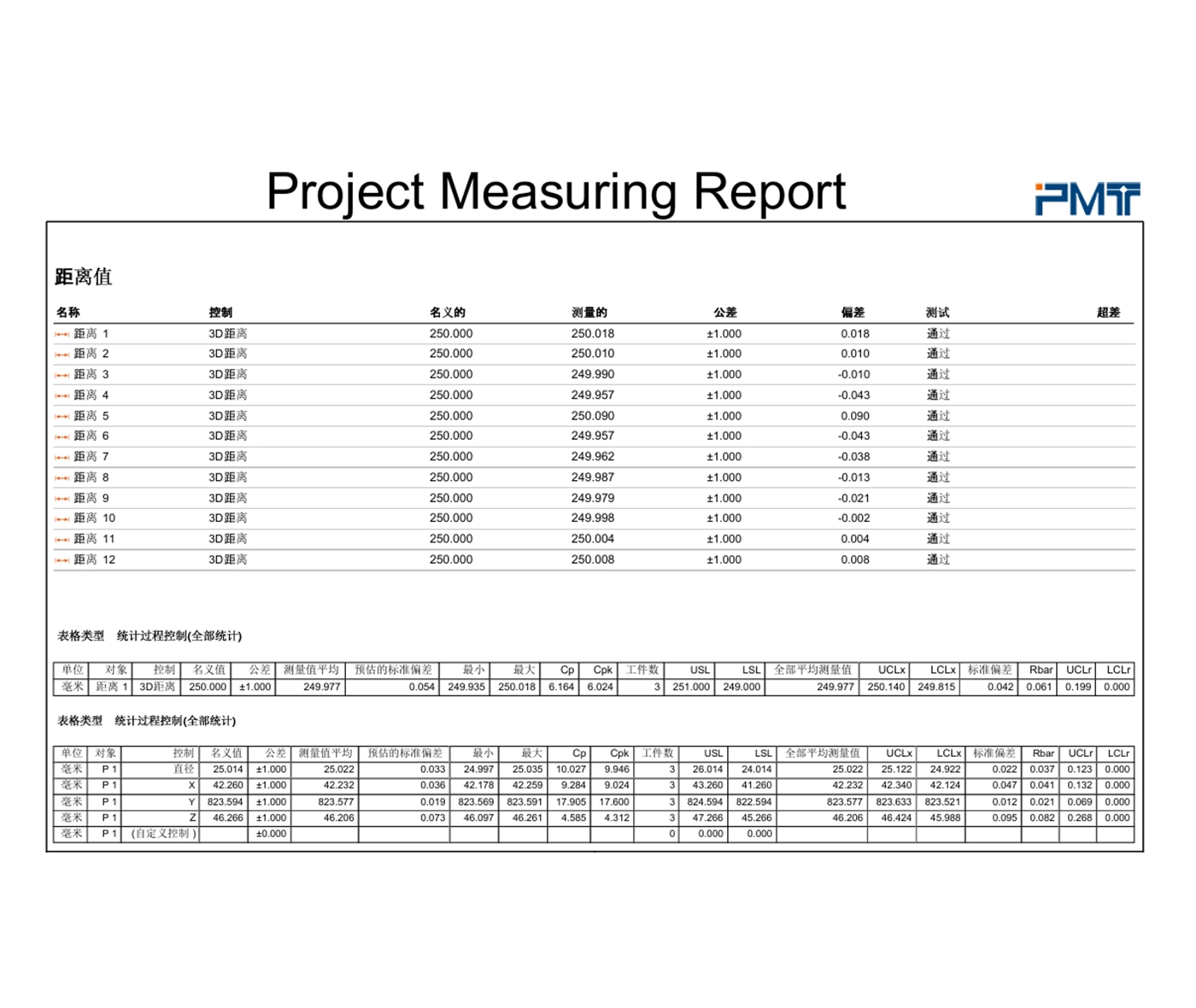
只需把元素测量出来,软件进行计算并直接分析出SPC结果。让数据处理更快一步,提高工作效率。
在手术机器人领域,三坐标轨迹检测被广泛应用于评估机器人的位姿精度和重复性。例如,在基于影像导航引导定位的手术机器人应用中,研究人员通过三坐标测量仪对机器人的工作空间进行测量,并评估了机器人在不同位姿下的距离准确度和重复性。实验结果表明,该方法可以有效地提高手术机器人的定位精度和手术成功率。
医疗设备机器人三坐标轨迹检测是一项关键的技术应用,它涉及到医疗设备的精度、安全性和可靠性。通过采用高精度的测量方法和设备,可以确保机器人在手术过程中的运动轨迹符合预设要求,从而提高手术的精度和安全性。