

在现代制造业中,大尺寸与复杂结构工件的质量检测需求正迅速增长,三坐标测量技术因此得到广泛应用。然而,所有测量仪器均存在固有量程的限制,作为便携式三坐标测量设备,关节臂测量机凭借其灵活性与多场景适应能力,可更好的通过“蛙跳”来实现量程的倍增。

关节臂“蛙跳”的精确定义
“基准坐标系匹配”俗称“蛙跳(Leapfrog)”,一般常见于关节臂测量机、激光跟踪仪之类的便携式三坐标,传统固定式测量机在特殊情况下也需要此项功能:
- 零件测量一部分后发生了位移,位移前后测量的元素需要关联计算;
- 零件超出机器量程,需要分段测量。
关节臂“蛙跳”的专业定义便是:不移动待测工件,而是通过移动关节臂本身,基于空间坐标系转换算法,将不同设备位置下的测量数据统一到同一坐标系中,实现连续测量的技术。
“蛙跳”是如何工作的?
在企业生产过程中,关节臂测量机具备灵活无死角的特点,可在狭窄空间内作业;并且部署快速,可搬移至生产现场,极其适合在线检测与大批量生产工艺验证。
因此,关节臂结合“蛙跳”技术便拥有了更为杰出的操作性,典型适用工况包括但不限于:大型模具的跨区域测量、整车车身结构的外廓与装配测量、在线生产中无法移动的大型设备、航空舱体、设备内部狭窄位置的测量等。

一、蛙跳前准备操作(首次蛙跳布点)
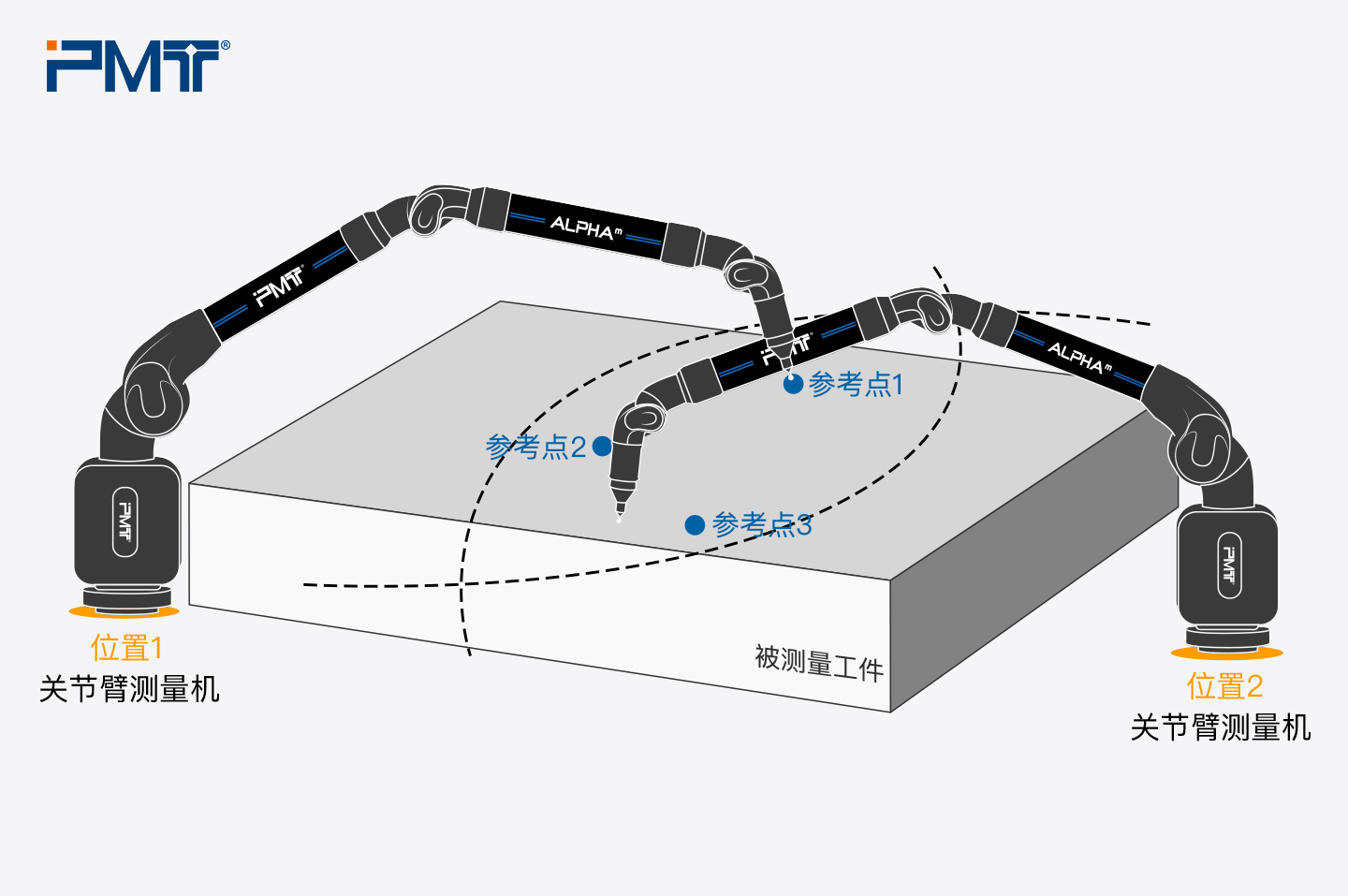
A. 布置参考点
在工件周围或者是工件表面使用蛙跳球或者蛙跳锥固定三个非共线的参考点。
布点原则:
- 可测性:参考点安置在关节臂移动前后均能触及的范围内;
- 分散性:参考点位置的选择应尽可能远离;
- 高精度性:参考点应选择在标准孔、标准球或者锥窝等精度较高的位置;
- 刚性:参考点必须牢固固定,避免位移。
B. 关节臂初始位置固定
将关节臂测量机固定在一个初始位置1。

二、正式蛙跳流程
A. 首次蛙跳
a. 建立坐标系
以关节臂(位置1)为初始位置,根据技术要求,建立坐标系对齐。

b. 采集特征
根据所需尺寸检测要求,完成设备在位置1的所有特征采集,并评价。
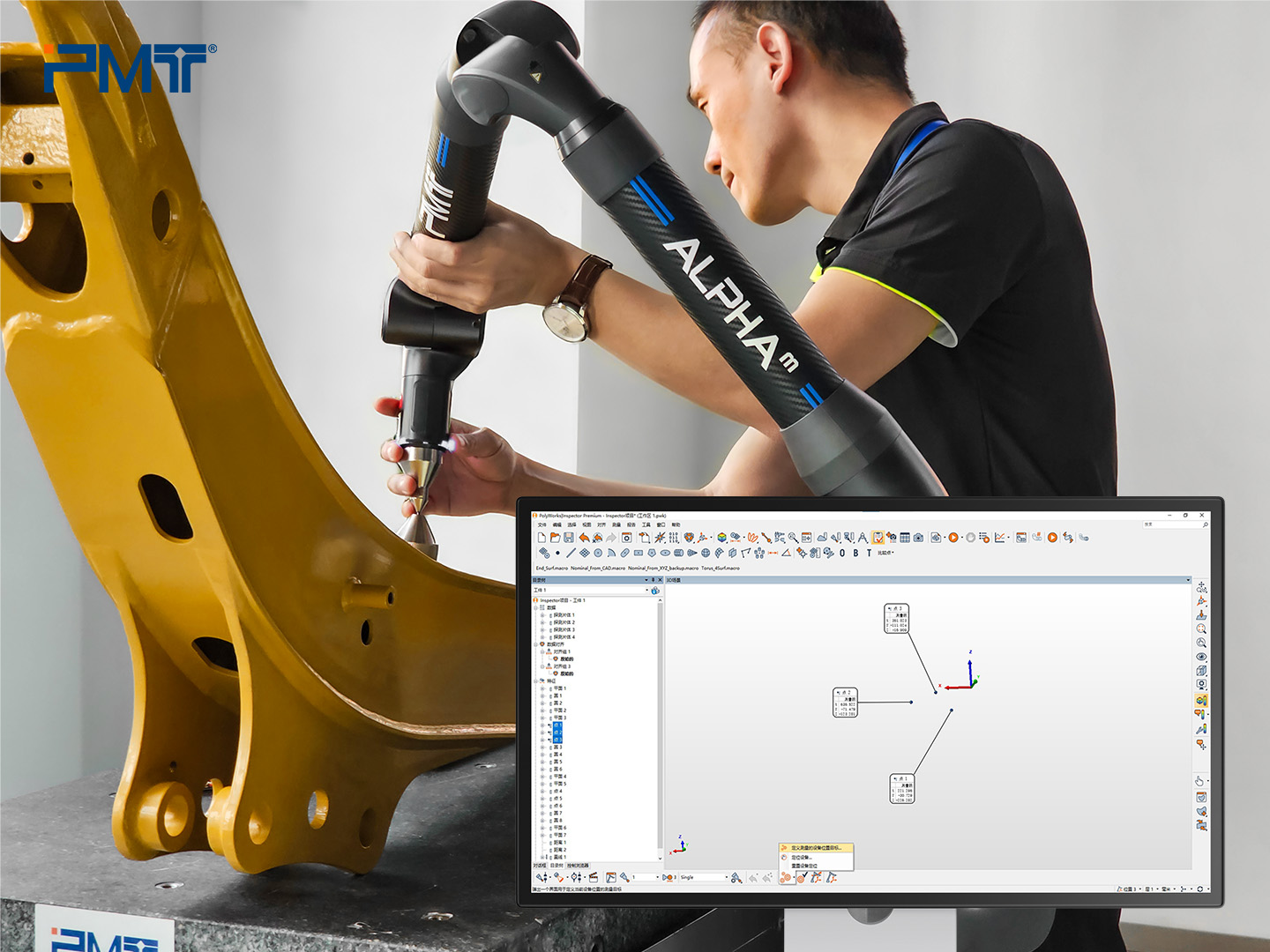
c. 定义目标位置
点击软件中的“定义测量的设备位置目标”命令后,根据首次布置的参考点,执行探测操作(点1-点3),再点击“移动位置”命令,接着将关节臂测量机移动至位置2,再次探测(点1-点3)的数值。此时,软件将通过计算得出蛙跳精度偏差,操作完毕。
d. 继续特征采集
蛙跳结束,再次确认设备在位置1和位置2测量的公共特征,比较特征偏差是否和蛙跳精度偏差一致。接着,采集位置2范围内特征进行几何公差评价,如位置1和位置2中有组合检测需求,可通过蛙跳技术轻松实现。

B. 多次蛙跳
然而,在实际测量过程中,单次蛙跳有时无法完全满足所有检测需求,一次蛙跳仅能完成部分特征,无法测得用于评价距离和平行度所需要的全部特征。因此,需要进行多次蛙跳操作。此时,若关节臂测量机无法触得所有所需位置,便需要再次布置新的参考点,操作流程与前文一致,直至采集完所有特征,完成工件的测量任务,并做出最终评价。

“蛙跳”技术的优势
- 扩展测量范围:可以轻松测量远超臂长的大型工件。
- 提高测量效率:只需二次测量蛙跳参考点,软件自动重新计算坐标系,节省了大量时间。
- 极高的场景灵活性:适用于狭窄空间、复杂场景、生产线在线测量。
- 降低生产成本:在精度满足的情况下,解决了部分测量情况下臂长限制的问题,避免了生产成本的增加。

结论
关节臂蛙跳是一种巧妙的测量策略,它通过动态改变关节臂的“站位”并利用固定的参考点,将多个站位的测量数据实时融合到一个统一的坐标系中,从而实现了“小臂测大物”的目标。但不可避免的是,蛙跳会损失一定精度。派姆特(PMT)建议:在规划测量方案时,必须综合考虑工件尺寸、精度要求和作业环境,并尽可能减少跳跃次数,通过专业实施让蛙跳成为企业在大尺寸测量场景下的高效解决方案。